





: AI sovrana sprona le aziende")


: Nuova sede, stessa strategia")











: Business AI, cambia il fare impresa")














Jet Propulsion Laboratory, contrariamente a come si potrebbe pensare, non produce razzi e nemmeno jet; il centro di ricerca e sviluppo della Nasa lega però il suo nome proprio all’attività delle origini negli anni ’30 a Pasadena. Oggi, invece, gestito dal California Institute of Technology, il centro si occupa principalmente della progettazione, dello sviluppo e della costruzione di mezzi spaziali in grado di funzionare e lavorare senza equipaggio.
Il centro è balzato agli onori delle cronache perché è qui che è stato sviluppato il piccolo “elicottero” Ingenuity che in questi giorni sorvola il suolo di Marte consentendo di ampliare le esplorazioni, come è possibile fare solo sfruttando l’agilità dei “droni”.
Il volo autonomo con un mini elicottero su Marte è fondamentale per navigare in aree a cui un rover non potrebbe accedere facilmente e apre nuove possibilità di esplorazione, sulla base della cattura di immagini ad alta risoluzione e della possibilità di coprire una porzione di terreno più ambia anche a grande velocità.
La sfida
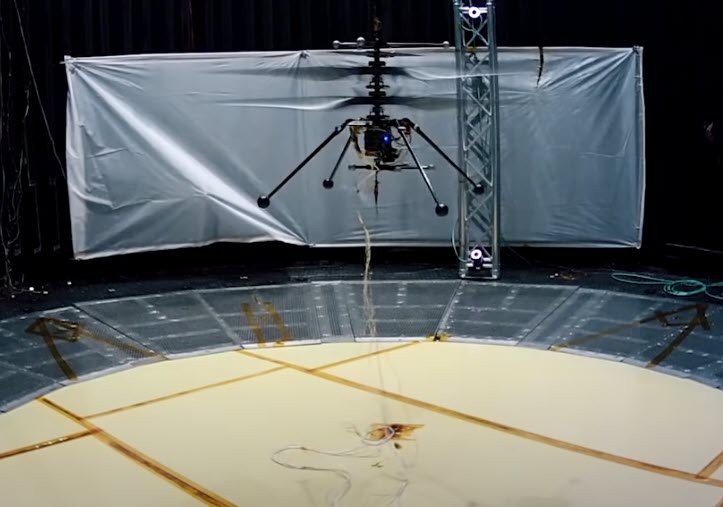
Ingenuity è arrivato su Marte a bordo della navicella Perseverance, a febbraio, e sorvola oggi il suolo di Marte sfruttando, come un “normale” elicottero, quattro pale in fibra di carbonio. Facile a dirsi, più complesso a farsi considerata una serie importante di ostacoli.
Il progetto di un velivolo, comandabile da terra ma in grado di rimanere operativo a milioni di chilometri di distanza, a temperature tutt’altro che “confortevoli”, e dopo un importante periodo di inattività, ha oltre sei anni e nasce addirittura nel 2014.
Vuole essere una dimostrazione di come sia possibile espandere l’esplorazione nello spazio, non a terra, nonostante una serie di complessità. Le evidenziamo in sequenza a partire dalle possibilità effettive di funzionamento del veicolo stesso. I segnali, dalla Terra a Marte impiegano diversi minuti per arrivare – in particolare, i comandi trasmessi all’elicottero in questo caso arrivano con un ritardo tra i 3 e i 22 minuti – quindi sarebbe impossibile controllare in tempo reale un elicottero, tramite telecomando, cosa che invece è data per scontata quando si utilizzano i droni a terra.

Serve quindi in primis fare in modo che il sistema che gestisce il funzionamento autonomo abbia una potenza di elaborazione sufficiente per gestire il delay, ma con consumi minimi, anche considerato come l’energia a disposizione del “quadri-cottero” proviene da un riscaldatore che serve a mantenere attivi i componenti nelle gelide serate marziane.
Oltre a questi problemi, e a quelli legati alla massima flessibilità necessaria per quanto riguarda le funzionalità di gestione, è fondamentale per Jpl quindi considerare anche l‘impatto delle radiazioni su Marte (alcune forme di radiazioni spaziali possono danneggiare in modo imprevedibile il silicio) e la variazione delle condizioni operative, perché le temperature estreme e le continue variazioni cicliche possono usurare le parti rapidamente.
La soluzione
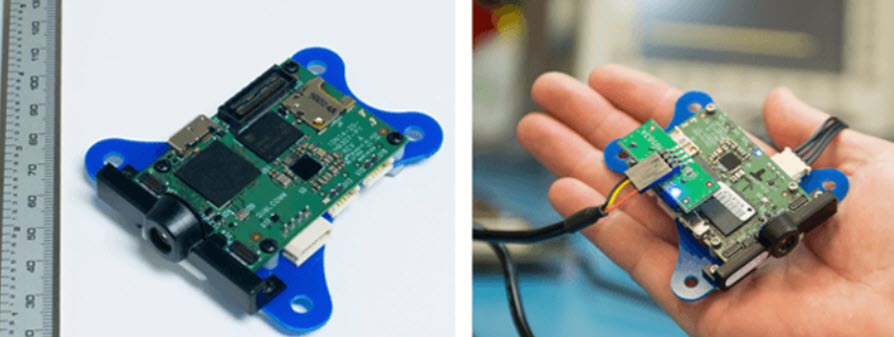
Jpl, dopo una lunga serie di analisi, sceglie Qualcomm Flight come piattaforma robotica di calcolo, sulla base di una serie di valutazioni tra cui la possibilità di ridurre i rischi di guasti. Qualcomm Flight di suo, non è stato progettato inizialmente per i viaggi nello spazio, ma certo invece per favorire l’utilizzo nei casi in cui è previsto il funzionamento autonomo.
In origine la piattaforma è stata promossa per il segmento dei droni consumer già dal 2015 in rapida crescita, sulla base di una scheda integrata, basata sul processore Qualcomm Snapdragon 801. L’integrazione consente una potenza di elaborazione superiore per unità di peso (Mips/grammo), insieme a funzionalità come video 4K Ultra HD, visione artificiale, comunicazione, navigazione e assistenza al volo anche in tempo reale (a seconda delle condizioni), tutte caratteristiche che la fanno preferire per questo progetto. In particolare poi il design di Qualcomm Flight è progettato per ridurre le dimensioni, il peso e il consumo di energia portando a tempi di volo più lunghi e maggiore sicurezza.
La scelta di Jpl è anch’essa partita da questo ordine di valutazioni. La possibilità di catturare immagini qualitativamente ineccepibili (4K Ultra HD), ma anche tutti i benefici legati ai sistemi di odometria inerziale visiva. L’odometria è la tecnica che permette di stimare la posizione di un sistema su informazioni provenienti da sensori in grado di misurare lo percorso, fondamentale quindi per un velivolo che opera effettivamente a distanze “siderali”.
Non meno importante, la necessità di “concentrare” tutto in un sistema di dimensioni molto ridotte con capacità di calcolo però sufficienti per l’elaborazione dei complessi algoritmi che l’elicottero avrebbe dovuto utilizzare. Infine, oltre a permettere il funzionamento in autonomia di Ingenuity, Qualcomm Flight è utilizzato anche nel sistema di comunicazione del Mars Rover.

I vantaggi
In questo modo Qualcomm Flight sul rover elabora le foto scattate dall’elicottero con l’elicottero Ingenuity e il mezzo che lavora sul suolo è in grado di lavorare in tandem per raccogliere e preparare le foto da inviare al team Jpl sulla Terra.
Tra i vantaggi di cui beneficia ora Jpl anche la possibilità di sfruttare i dati dei test che hanno anche portato a preziosi insegnamenti e potranno essere applicati alle future missioni.
Per esempio, Qualcomm è stata in grado di quantificare per Jpl come le parti si degradino dopo l’esposizione alle radiazioni, permettendo così la mitigazione dei rischi ed una serie di valutazioni specifiche in futuro per le future missioni, a sua volta l’azienda che sviluppa i microchip ha potuto beneficiare della metodologia di test adottata per il progetto ed ora estesa per la tecnologia commerciale. Ne emergono i benefici dati dall’utilizzo di piattaforme che lascino aperte le possibilità di integrazione specifiche spinte, sulla base dei test modellabili, in relazione alle esigenze di segmenti industriali diversificati.
© RIPRODUZIONE RISERVATA

: AI sovrana sprona le aziende")




")