





: AI sovrana sprona le aziende")


: Nuova sede, stessa strategia")











: Business AI, cambia il fare impresa")














Non c’è lavoratore che non abbia familiarità con l’Inail per quanto riguarda la sua attività e le pratiche inerenti l’antinfortunistica. Molto meno conosciuta è l’attività di ricerca e innovazione tecnologica che l’Inail svolge attraverso bandi e collaborazioni con altri istituti, attività sempre volta a migliorare le condizioni di sicurezza e salute sul lavoro. Il 70% dei problemi di salute generati nei luoghi di lavoro è relativo all’apparato muscolo-scheletrico e al tessuto connettivo. Si tratta del cosiddetto rischio da sovraccarico biomeccanico, disturbi e patologie generati non tanto da un singolo sforzo, ma da una serie di microtraumi dovuti a sforzi ripetitivi e spesso aggravati da posture incongrue, che possono portare, nei casi più gravi, anche a invalidità permanenti. Con una popolazione che diventa in media sempre più anziana (le proiezioni dicono che nel 2050 in Europa gli over-75 saranno 150 milioni, oltre il 30% in più rispetto al presente), è sempre più urgente applicare una prevenzione a questo tipo di invalidità. Va in questa direzione il finanziamento di circa cinque milioni di euro, applicato per un primo triennio e poi rinnovato, che l’Inail ha concesso all’Iit, l’Istituto Italiano di Tecnologia. La ricerca finanziata in questo modo segue due filoni: il primo è la creazione di un robot umanoide in grado di assistere gli operai sul lavoro, liberandoli dai compiti più gravosi e rischiosi per la salute; il secondo è la combinazione di questo robot con tecnologie indossabili per lo studio e la prevenzione del rischio biomeccanico.
Un robot-collaboratore in fabbrica
Uno dei prodotti più avanzati della collaborazione tra Inail e Iit è ergoCub, il robot umanoide progettato per collaborare con gli operai umani, realizzato dall’Artificial Mechanical Intelligence Lab dell’Iit coordinato da Daniele Pucci.

Credits: Istituto Italiano di Tecnologia – © IIT, all rights reserved)
La funzione di ergoCub è quella di affiancare o sostituire le persone nelle operazioni potenzialmente rischiose per la salute umana, come il sollevamento e il trasporto di carichi pesanti. Ma per poter essere veramente utile sul lavoro non può limitarsi a questo, ma deve essere in grado di svolgere efficacemente un gran numero di compiti di concerto con gli esseri umani.
La struttura di base di ergoCub deriva da quella di iCub, il robot-bambino che è diventato il simbolo di Iit. Il robot è alto 1,5 m e pesante 55,7 kg, e incorpora una telecamera per la visione di profondità e un Lidar (acronimo di Light Detection and Ranging, tecnologia di telerilevamento che utilizza il radar per il calcolo delle distanze e generare modelli 3D) per la navigazione, garantendo movimenti precisi in ambienti diversi. L’inclusione di sensori di forza-coppia consente al robot di rispondere in modo intuitivo alle forze esterne. Il viso è invece costituito da uno schermo Oled che gli consente di comunicare in modo espressivo.

Il robot è in grado di camminare a una velocità simile a quella di un essere umano, e di trasportare carichi fino a circa 10 kg (un valore che si punta ad incrementare). L’intelligenza artificiale di cui è dotato gli permette di muoversi autonomamente scegliendo il percorso corretto attraverso un ambiente di lavoro ed evitando gli ostacoli. Ma le applicazioni più interessanti si hanno quando ergoCub viene usato insieme alle tecnologie indossabili sviluppate dall’Iit.
Tecnologie indossabili per digitalizzare il movimento
L’Artificial Mechanical Intelligence Lab dell’Iit ha infatti realizzato anche iFeel, un sistema di tute, scarpe e intelligenza artificiale per lo studio e la previsione del rischio biomeccanico. Le tute iFeel sono sensorizzate; contengono cioè sensori inerziali e sistemi di vibrazione in grado di avvisare gli utenti quando gli indici di rischio biomeccanico superano soglie predefinite. Le scarpe iFeel, invece, possono misurare le interazioni tra i piedi e il pavimento in termini di forze e coppie.
La funzione di questa tecnologia è duplice. Da un lato, le tute e le scarpe possono permettere a un’intelligenza artificiale di effettuare un’analisi posturale del lavoratore, misurando gli sforzi articolari in maniera personalizzata rispetto al soggetto. L’intelligenza artificiale può adottare anche un ruolo predittivo, segnalando al lavoratore (tramite vibrazioni della tuta) che sta compiendo un movimento scorretto e potenzialmente dannoso, prima che questo sia stato completato e abbia provocato danni.
L’altro utilizzo di questa tecnologia, come abbiamo detto, è in coppia con il robot ergoCub. Quando ergoCub lavora insieme a operai dotati di tute sensorizzate, è in grado di ottimizzare i propri movimenti armonizzandoli con i loro e fornendo, per esempio, l’aiuto ottimale per minimizzare i rischi nel corso del sollevamento di un oggetto pesante. Ma non è tutto: integrando le informazioni ottenute attraverso i propri sensori di visione e quelle ricevute dai sensori indossati dagli operai, ergoCub può imparare a prevedere i movimenti degli esseri umani e a riconoscere le loro intenzioni. L’obiettivo è creare così un perfetto robot collaborativo, in grado di comprendere ciò che i compagni di lavoro fanno e fornire spontaneamente il miglior aiuto possibile.
Collaboratori non umanoidi
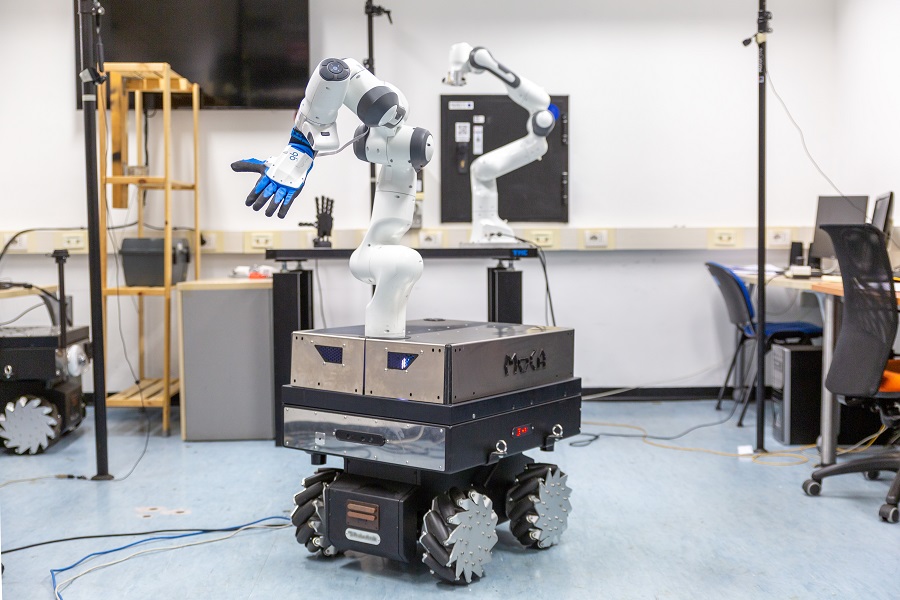
La collaborazione tra umani e robot non è studiata solo attraverso i robot umanoidi. Un altro progetto è quello portato avanti dall’HRI2, Human-Robot Interfaces and Interaction Laboratory (interfacce e interazione umani-robot), unità di ricerca diretta da Arash Ajoudani, che sfrutta i robot Moca (acronimo di MObile Collaborative robot Assistant), ovver un assistente robotico collaborativo mobile. I Moca sono piattaforme mobili dotate di ruote che permettono loro di spostarsi, nonché di braccia e di diversi sistemi sensoriali: sono quindi in grado di vedere e di toccare.

I Moca sono stati al centro del progetto europeo Sophia, che ha ricevuto finanziamenti per circa sette milioni di euro. Obiettivo sviluppare una nuova generazione di robot collaborativi e sistemi indossabili intelligenti che possano migliorare l’ergonomia del posto di lavoro e la flessibilità della produzione, fino a raggiungere in futuro una personalizzazione di massa delle tecnologie.
Anche i robot collaborativi Moca lavorano in combinazione con tecnologie indossabili, che funzionano sia come sistemi informativi, fornendo avvisi e guidando l’operatore che li indossa, sia come robot (wearBots) per avere un supporto mirato alle articolazioni. Il tutto per creare un ambiente di lavoro in cui umani e robot collaborano e vengono evitate situazioni che possono essere dannose per l’apparato muscolo-scheletrico degli operai. Queste tecnologie sono state sperimentate attivamente all’interno di aziende europee come Handkamp e Hidria.
Non solo prevenzione: protesi ed esoscheletri
Le tecnologie che abbiamo visto ci prospettano uno scenario in cui gli infortuni sul lavoro e le malattie professionali saranno sempre più rari. Nondimeno, nel mondo presente e presumibilmente in quello futuro, ci sarà sempre chi ha bisogno di aiuto per affrontare una menomazione temporanea o permanente. A questo scopo Inail e Iit hanno allestito un laboratorio congiunto per lo studio delle tecnologie riabilitative, diretto da Matteo Laffranchi. Scopo del laboratorio è realizzare dispositivi prostetici e riabilitativi che possano essere subito utilizzati nella terapia.

Tra le realizzazioni più interessanti del laboratorio c’è Twin, un robot indossabile in grado di trasferire, a persone con capacità motoria ridotta o assente, l’energia che permette loro di alzarsi, mantenere la posizione eretta, camminare e sedersi. Sviluppato per essere in grado di adattarsi alle esigenze del singolo utente, Twin è stato progettato a partire dai risultati dei test clinici con i pazienti e mira al reinserimento del lavoratore gravemente infortunato in contesti sociali e di lavoro. Si prevede che, una volta ottenuta la marcatura CE, possa essere a disposizione dei pazienti nel corso di pochi anni.
Un sistema analogo, ma per la parte superiore del corpo, è Float, un esoscheletro per la parte superiore del corpo, che offre al paziente un sostegno e un aiuto variabili col procedere della terapia, ed è in grado di memorizzare e ripetere qualunque tipo di movimento, consentendo una riabilitazione più varia e meno noiosa.

Infine il laboratorio dedicato alle Rehab Technologies studia anche protesi per rimpiazzare arti perduti. Hannes e Omnia sono due protesi robotiche che sono in grado di rimpiazzare rispettivamente la mano e la parte inferiore della gamba (ginocchio e caviglia), riproducendone in modo quasi totale le funzionalità. Queste protesi vengono continuamente affinate perché siano più robuste, più leggere, e per dotarle di sensori che siano in grado di comunicare con il corpo, in modo che il loro uso sia sempre più naturale ed efficace.
—
Marco Passarello, giornalista, caposervizio presso Tgr Rai Alto Adige.
© RIPRODUZIONE RISERVATA

: AI sovrana sprona le aziende")




")