





: AI sovrana sprona le aziende")


: Nuova sede, stessa strategia")











: Business AI, cambia il fare impresa")














Un cavallo meccanico, in grado di raggiungere i 25 chilometri orari galoppando su strada e di inerpicarsi su scalinate o terreni accidentati dove nessuna moto potrebbe andare. Il tutto spinto da una cella a combustibile alimentata a idrogeno, e pilotabile in modo istintivo anche da un principiante, grazie a un’AI che controlla il movimento delle zampe in base a come il passeggero sposta il proprio centro di gravità o agisce sul manubrio e sulle staffe. È il Corleo della Kawasaki, presentato all’Expo di Osaka lo scorso aprile.
Si tratta di un robot ancora molto lontano da un’esistenza concreta: Kawasaki ha mostrato solo dei video in computer grafica e un prototipo in grado di cambiare posizione ma rimanendo fisso su un piedistallo.

E’ però di un esempio dell’interesse dell’industria per lo sviluppo di veicoli, autonomi o pilotati, dotati di zampe meccaniche al posto delle ruote, cosa che amplierebbe molto la loro versatilità di impiego. In Italia l’unità di ricerca Dynamic Legged Systems dell’Istituto Italiano di Tecnologia, diretta da Claudio Semini e con sede a Genova, si occupa da quasi due decenni dello studio di questo tipo di locomozione. Può essere definito un esempio di quella che si definisce robotica bioispirata, che cioè crea soluzioni tecnologiche prendendo ispirazione da ciò che esiste in natura, sfruttando l’ottimizzazione che l’evoluzione ha creato nel corso di milioni d’anni. L’analisi della natura mostra come spesso le soluzioni più efficienti finiscano per emergere anche in contesti molto differenti; per esempio, l’andatura al trotto ricorre in ogni tipo di quadrupede, dal più grande al più piccolo.
Robot, prototipi e sperimentazioni sul campo
Le ricerche dell’unità Dynamic Legged Systems si sono concretizzate nella realizzazione di vari prototipi, di cui il capostipite è HyQ (acronimo di Hydraulically actuated Quadruped robot, robot quadrupede con attuazione idraulica), presentato per la prima volta nel 2011. HyQ muove le sue quattro zampe attraverso una serie di attuatori idraulici disposti su dodici giunture. È in grado di adottare diversi tipi di camminata, saltare e correre raggiungendo una velocità di due metri al secondo. Da HyQ sono derivati HyQ2Max, un modello dotato di protezioni per cavi, giunti e tubi e quindi più solido e adatto a operare anche al di fuori di un laboratorio; e infine HyQReal. Quest’ultimo nel 2019 si è reso protagonista di un’impressionante dimostrazione pubblica presso l’aeroporto di Genova, trainando per una decina di metri un aeroplano Piaggio P180 Avanti del peso di oltre tre tonnellate.

Gran parte dello sforzo tecnologico infuso nella creazione di questi prototipi è andato nello sviluppo di un sistema di sensori e intelligenza artificiale in grado di consentire ai robot una camminata “robusta”: la macchina non deve solo essere in grado di avanzare, ma anche di evitare gli ostacoli, di poggiare la zampa nei punti più sicuri e di reagire nella maniera migliore in caso di imprevisti che possano farle perdere l’equilibrio. Oltre allo stimolo visivo, dato da telecamere o da lidar (tecnologia analoga al radar ma che usa luce laser al posto di radiofrequenze), il robot usa anche uno stimolo tattile, cioè una misura della coppia erogata da ciascuno dei motori, attraverso la quale gli è possibile calcolare per ogni zampa la forza di reazione rispetto al terreno.
Attualmente tutti i robot di questo tipo sviluppati dall’Iit vengono mossi da una batteria che genera l’elettricità necessaria per azionare una pompa che mette in pressione l’olio di un sistema idraulico. L’attuazione idraulica è preferita a quella elettrica perché consente una potenza maggiore a parità di dimensioni. Si possono sfruttare componenti standard di grande precisione, come quelli utilizzati nell’automobilismo. Solo per robot molto piccoli diventa conveniente usare motori elettrici, data l’assenza di componentistica standard di tipo idraulico.
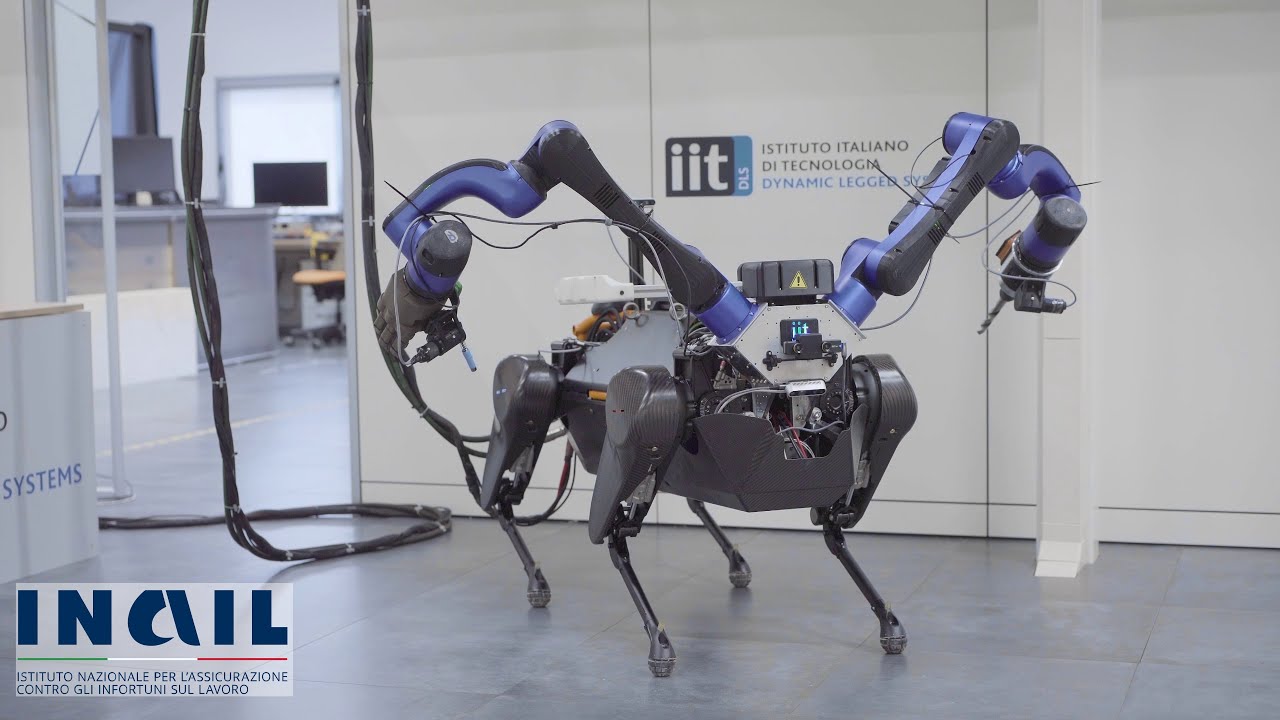
Per robot di questo tipo sono già allo studio svariate applicazioni pratiche. Un esempio è il progetto del Robot Teleoperativo, che IIT sta sviluppando in collaborazione con Inail e con il Corpo Nazionale dei Vigili del Fuoco. Si tratta di un robot quadrupede simile a quelli già descritti, che però è dotato anche di un braccio robotico sviluppato dal centro Humanoids and Human Centered Mechatronics, sempre dell’Iit. La macchina è pensata per consentire agli operatori di agire senza rischio in situazioni di emergenza, come all’interno di un edificio pericolante o in fiamme. Attraverso un visore per realtà virtuale sviluppato dal gruppo Advanced Robotics dell’Iit, l’operatore è in grado di dirigere il robot e di visualizzare con precisione l’ambiente che lo circonda. In più, attraverso un esoscheletro applicato alla mano, l’operatore può controllare il braccio robotico, che può quindi essere usato a distanza per effettuare operazioni come l’apertura di una porta o di una valvola o lo spostamento di un oggetto.
Un’altra applicazione in fase di sviluppo è relativa all’agricoltura di precisione, e in particolare alla viticoltura, che viene praticata spesso su terreni scoscesi dove i mezzi su ruote si trovano in difficoltà. Il progetto Vinum, realizzato da Iit in collaborazione con l’Università Cattolica del Sacro Cuore di Piacenza, si concentra sulla realizzazione di un robot in grado di effettuare la potatura invernale delle viti; un’operazione che rappresenta circa un terzo del lavoro da svolgere annualmente in una vigna e richiede precisione nel taglio, e che quindi non può essere demandata a semplici macchine automatiche. In questo caso il robot quadrupede è la piattaforma che trasporta in giro per la vigna un braccio robotico dotato di un sistema di visione appositamente sviluppato, in grado di effettuare la potatura usando un comune paio di cesoie con un’accuratezza paragonabile a quella di un operatore umano.
Un terzo settore in cui l’Iit si sta impegnando a portare i robot quadrupedi è quello dell’esplorazione spaziale. Finora sulla superficie di pianeti e satelliti si sono impiegati rover dotati di ruote o, in alcuni casi, droni volanti. Ambedue però hanno difficoltà a raccogliere campioni in zone scoscese o accidentate, che spesso sono le più interessanti. Il progetto Ant (come “formica” in inglese, ma sta per Autonomous Non-wheel all-Terrain rover, rover autonomo privo di ruote per ogni terreno), realizzato in collaborazione con l’agenzia spaziale europea Esa, il centro ricerche tedesco per l’intelligenza artificiale e il consorzio Airbus, prevede lo sviluppo di un rover dotato di zampe che diventi uno standard per l’esplorazione planetaria. In questo caso è previsto che il robot possa avere non solo quattro zampe, ma anche sei, in quanto la ridondanza è opportuna in un contesto in cui non è possibile effettuare riparazioni. Il primo banco di prova per questo tipo di robot sarà molto probabilmente la Luna, di cui si prevede nei prossimi anni una ripresa dell’esplorazione in grande stile.
Al di là dei settori appena esposti e di altre aree di utilizzo civile, come il monitoraggio di piattaforme petrolifere o di altri impianti industriali, un altro settore in cui si prevede un ampio uso dei robot quadrupedi è quello militare. Da tempo gli eserciti del mondo sono interessati a usare robot per i compiti che un tempo venivano affidati a muli e a cani addestrati, cioè il trasporto di equipaggiamento pesante e l’individuazione di mine o di truppe nemiche. Le ricerche di questo tipo sono ovviamente coperte da segreto ed è difficile valutarne il grado di avanzamento. Tuttavia nel corso della guerra Russia-Ucraina il governo ucraino ha ammesso ufficialmente di avere utilizzato cani robot sul campo di battaglia. Si tratterebbe di robot non autonomi ma telecomandati, utilizzati per compiti di esplorazione. Sia gli Usa, sia la Russia hanno svolto esercitazioni usando prototipi di robot quadrupedi dotati di armi. Nonostante i problemi etici impliciti nella costruzione di robot armati, è probabile che la loro introduzione sul campo sia imminente.
Concludiamo questa carrellata sui robot quadrupedi con un altro esempio di utilizzo pacifico: presto vi potrebbe capitare di avvistare robot quadrupedi che si aggirano tra i boschi dell’Alto Adige. Si tratta del progetto Forma (acronimo di Forest Robotic Monitoring and Automation), finanziato dal Fondo Europeo di Sviluppo Regionale con il compito di sviluppare robot e droni per il monitoraggio delle foreste. I robot verranno utilizzati nell’ambito del progetto Digiforest che, in collaborazione con diversi altri atenei, si propone di creare una rappresentazione digitale di grande precisione delle foreste europee a supporto della gestione del territorio. I robot sono dotati di sensori lidar i cui dati vengono elaborati da algoritmi di intelligenza artificiale, sotto la supervisione del professor Enrico Tomelleri della facoltà di scienze agrarie, ambientali e alimentari della Libera Università di Bolzano. Anche in questo caso la scelta si è orientata su robot quadrupedi per la loro capacità di muoversi su ogni tipo di terreno.

—
*Marco Passarello, giornalista, caposervizio presso Tgr Rai Alto Adige.
© RIPRODUZIONE RISERVATA

")
: AI sovrana sprona le aziende")




")